
News
06.2026
Hierarchical Policy accepted to ECCV 2026, and CEER accepted to IROS 2026.05.2026
Joined Amazon Robotics as an Applied Scientist Intern in the Bay Area for summer 2026.05.2026
Co-organized the Workshop on Manipulation Robustness at ICRA 2026.12.2025
Released OpenTouch, a benchmark for full-hand tactile sensing in the wild.Publications
* equal contribution

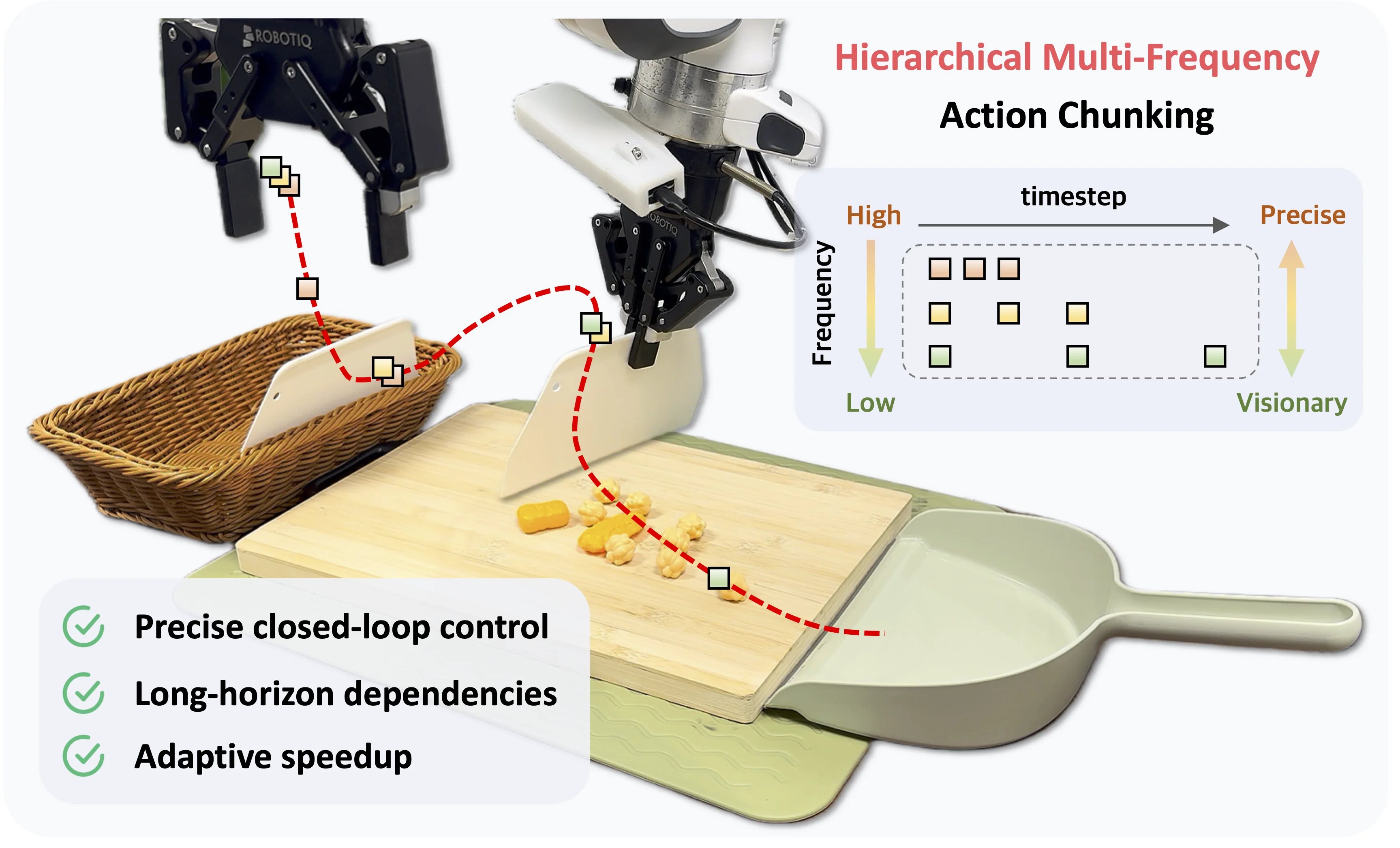
Force-to-Belief: Turning Noisy Proprioception into Action-Relevant Belief
Yuxiao Zhu*,
Jinzhou Li*,
Yifei Dong,
Haoyu Li,
Xinyuan Luo,
Xianyi Cheng
RSS 2026 Workshop on Planning and Control with Imperfect Sensors and Perception
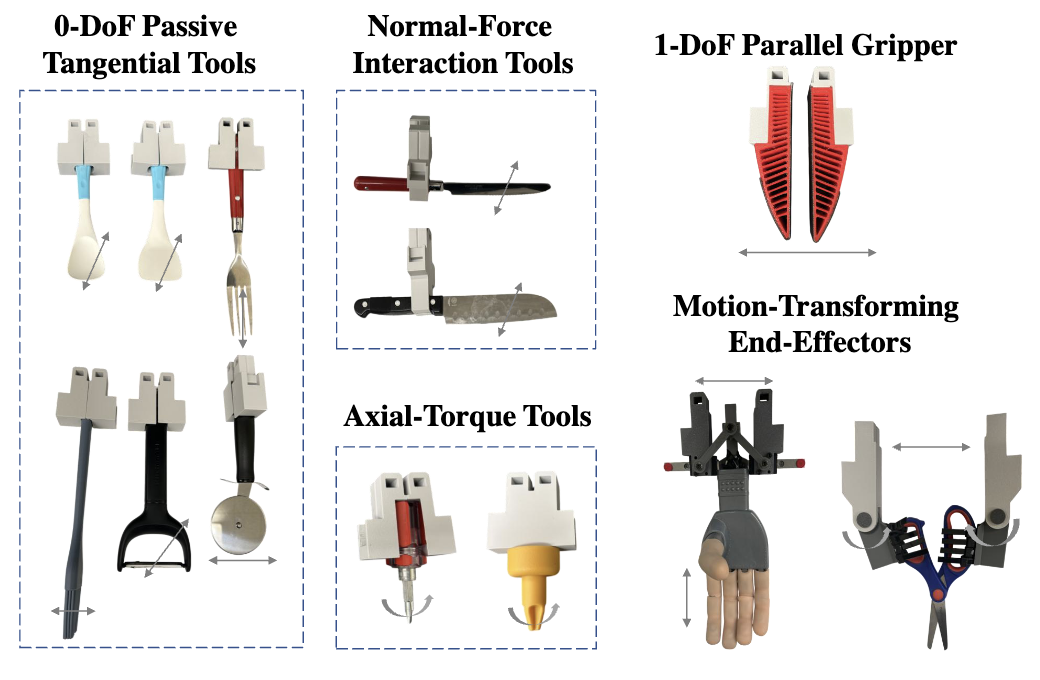
Any-ttach: Quick End-effector Swapping Enables Manipulation Dexterity with Simplicity
Weizhe Ni*,
Jinzhou Li*,
Haoyu Li,
Wenjing Pan,
Cody Andres Alessio-Bunnell,
Xianyi Cheng
RSS 2026 Workshop on Dexterous Manipulation: Scalable Learning for Human-Level Skills
arXiv 2026
Webpage •
Paper •
Hardware Design
CEER: Compliant End-Effector and Root Control as a Unified Interface for Hierarchical Humanoid Loco-Manipulation
Xinyuan Luo,
Xingrui Chen,
Xunjian Yin,
Hongxuan Wu,
Boxi Xia,
Zhuoqun Chen,
Jinzhou Li,
Boyuan Chen,
Xianyi Cheng
IROS 2026
Webpage •
Paper

OpenTouch: Bringing Full-Hand Touch to Real-World Interaction
Yuxin Ray Song*,
Jinzhou Li*,
Rao Fu*,
Devin Murphy,
Kaichen Zhou,
Rishi Shiv,
Yaqi Li,
Haoyu Xiong,
Crystal Elaine Owens,
Yilun Du,
Yiyue Luo,
Xianyi Cheng,
Antonio Torralba,
Wojciech Matusik,
Paul Pu Liang
arXiv 2025
Webpage •
Paper
•
Code
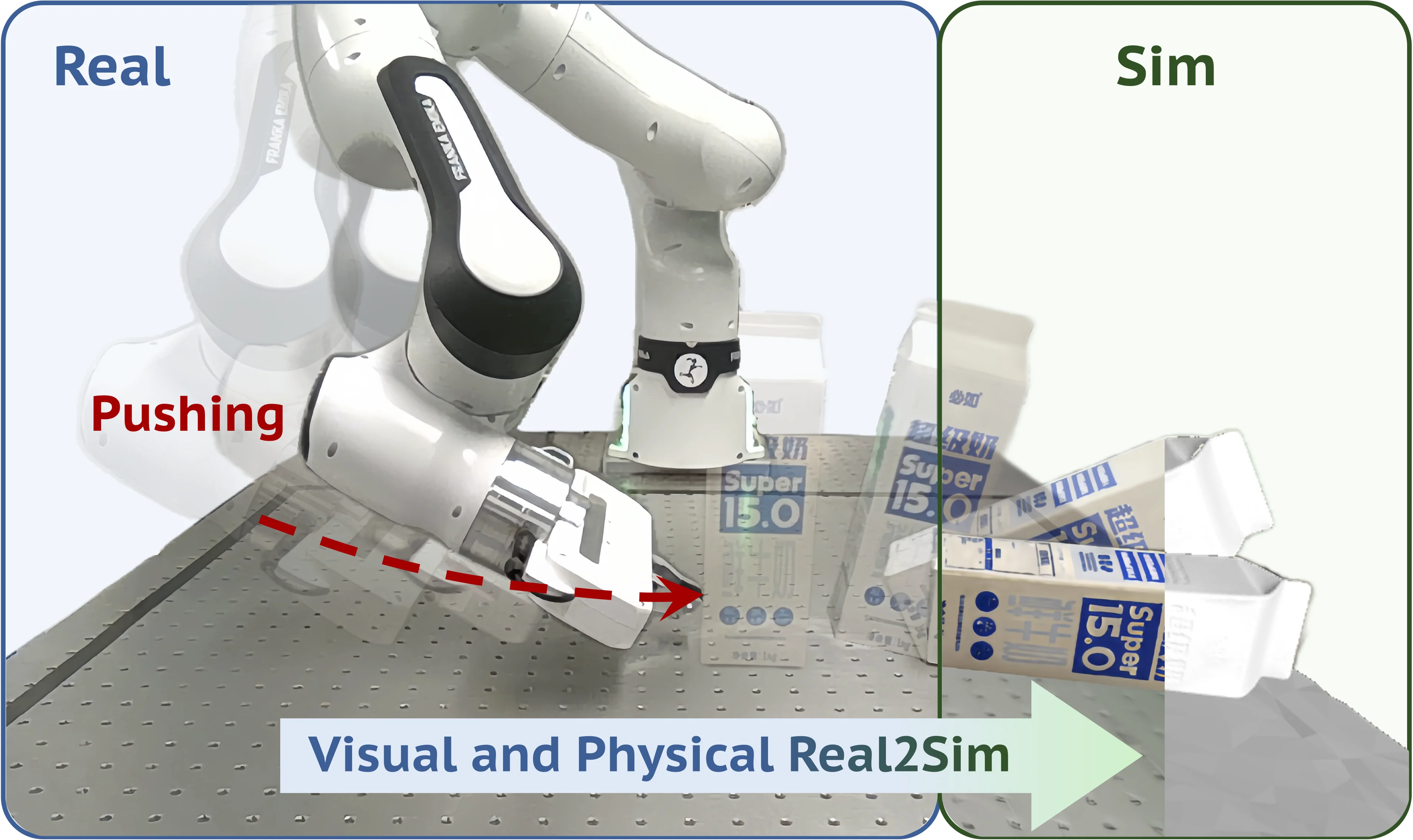
TwinAligner: Visual-Dynamic Alignment Empowers Physics-aware Real2Sim2Real for Robotic Manipulation
Hongwei Fan*,
Hang Dai*,
Jiyao Zhang*,
Jinzhou Li,
Qiyang Yan,
Yujie Zhao,
Mingju Gao,
Jinghang Wu,
Hao Tang,
Hao Dong
arXiv 2025
Webpage •
Paper
•
Code
ClutterDexGrasp: A Sim-to-Real System for General Dexterous Target Grasping in Cluttered Scenes
Zeyuan Chen*,
Qiyang Yan*,
Yuanpei Chen*,
Tianhao Wu,
Jiyao Zhang,
Zihan Ding,
Jinzhou Li,
Yaodong Yang,
Hao Dong
CoRL 2025 (Oral ~5%)
Webpage •
Paper
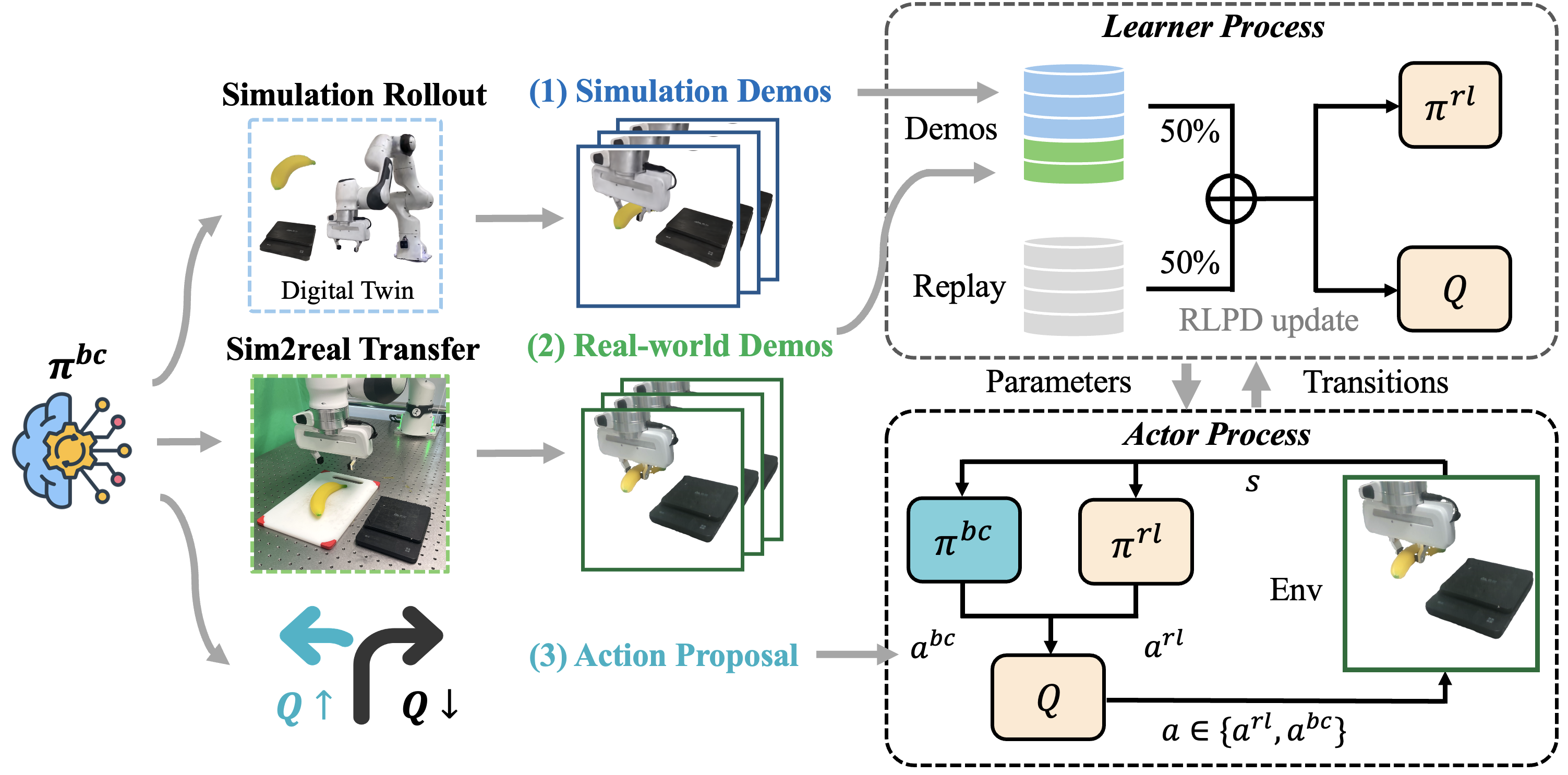
SimLauncher: Launching Sample-Efficient Real-world Robotic Reinforcement Learning via Simulation Pre-training
Mingdong Wu*,
Lehong Wu*,
Yizhuo Wu*,
Weiyao Huang,
Hongwei Fan,
Zheyuan Hu,
Haoran Geng,
Jinzhou Li,
Jiahe Ying,
Long Yang,
Yuanpei Chen,
Hao Dong
IROS 2025
Webpage •
Paper
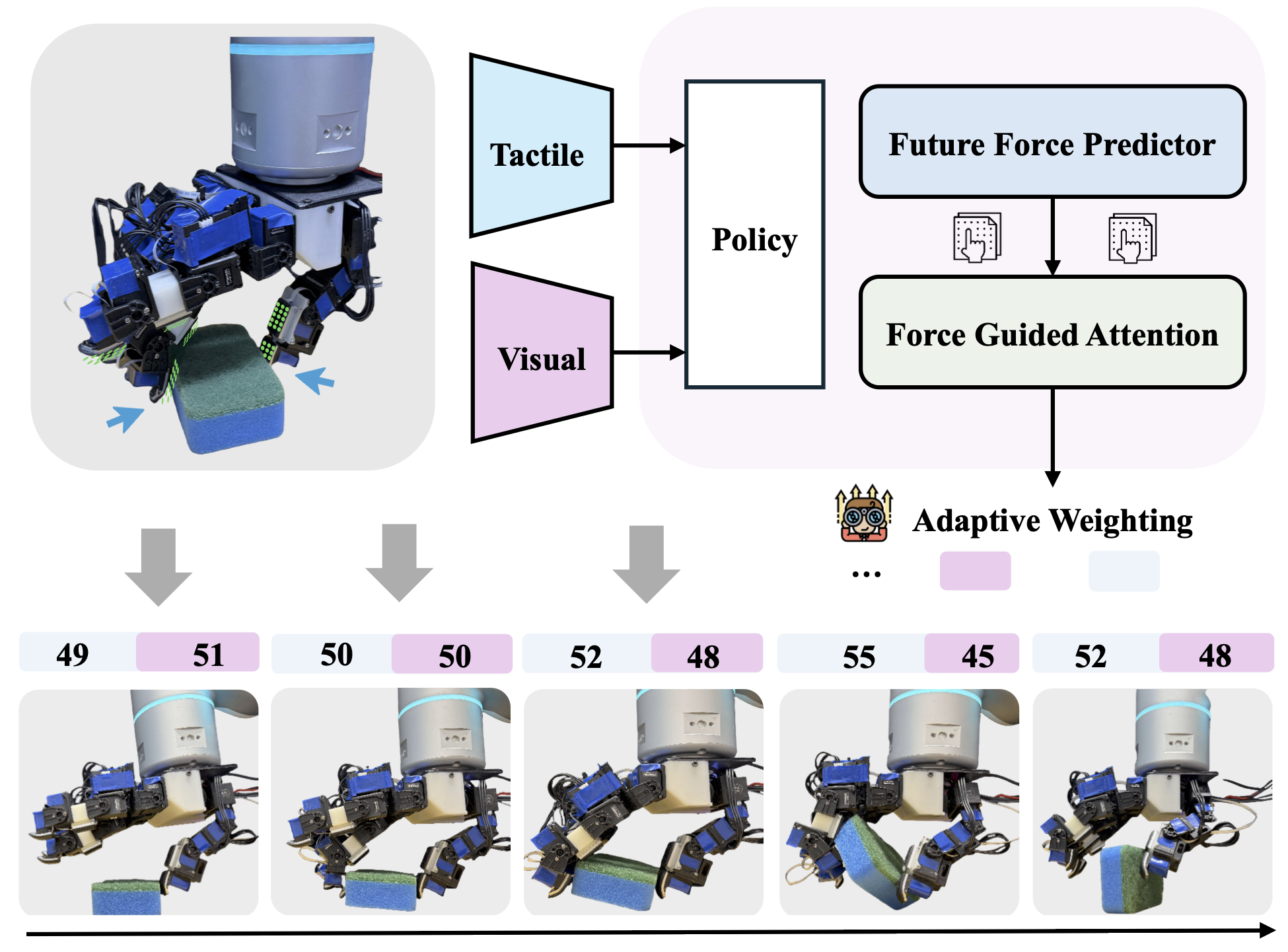
AdapTac-Dex: Adaptive Visuo-Tactile Fusion with Predictive Force Attention for Dexterous Manipulation
Jinzhou Li*,
Tianhao Wu*,
Jiyao Zhang+,
Zeyuan Chen+,
Haotian Jin,
Mingdong Wu,
Yujun Shen,
Yaodong Yang,
Hao Dong
IROS 2025
Webpage •
Paper
•
Code
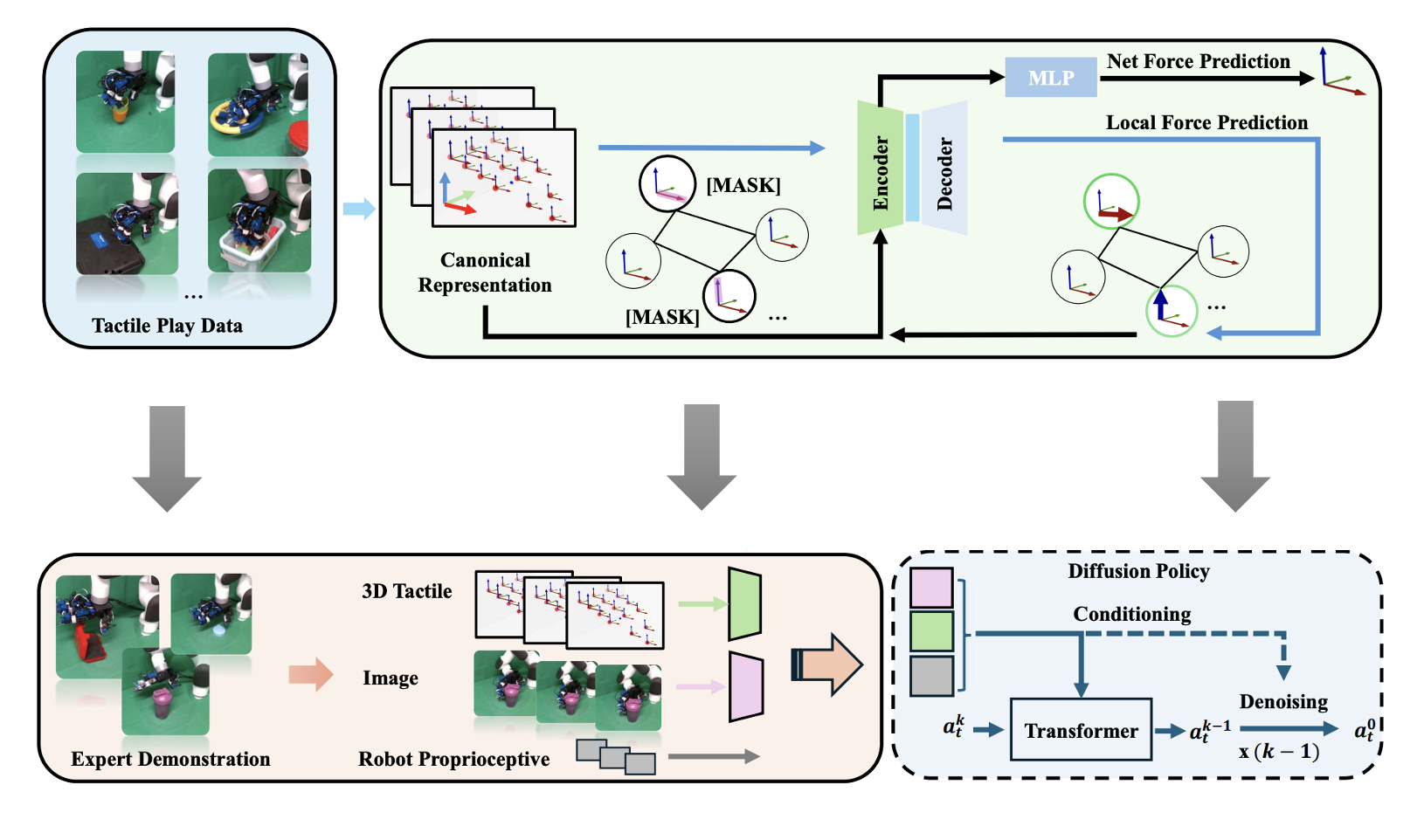
Canonical Representation and Force-Based Pretraining of 3D Tactile for Dexterous Visuo-Tactile Policy Learning
Tianhao Wu,
Jinzhou Li*,
Jiyao Zhang*,
Mingdong Wu,
Hao Dong
ICRA 2025
Webpage •
Paper
•
Code
Experience
Teaching
Projects

Service
Conference Reviewer: ICRA 2024, 2025, 2026; IROS 2026; NeurIPS 2026
Journal Reviewer: IEEE Robotics and Automation Letters (RA-L)
Workshop Organizer: Workshop on Manipulation Robustness at ICRA 2026
Students I Work With
Yuxiao Zhu Undergraduate CS Duke 2026 - now
Zihan Zhuang Undergraduate Engineering Oxford 2026 - now
Anthony Zhang Undergraduate CS & EE Duke 2026 - now
Cody Andres Alessio-Bunnell Undergraduate ME Duke 2025 - 2026 Next → PhD UT Austin