Jinzhou Li
I am a first-year PhD student in Robotics at Duke University, advised by Prof. Xianyi Cheng. Before Duke, I worked with Prof. Hao Dong at Peking University. I did my master's at Cornell University, where I was advised by Prof. Maha Haji, and completed my bachelor's degree at the University of Vermont. I also had the chance to work with Prof. Daniel Hastings at MIT. My research interests focus on dexterous manipulation, multimodal learning, and robot learning with the goal of enabling robots to act and think more like humans. I'm always happy to chat! Please feel free to drop me an email if you're interested in research, Ph.D. applications, potential collaborations, or research opportunities.
Email X Google Scholar LinkedIn Github



OpenTouch: Bringing Full-Hand Touch to Real-World Interaction
Yuxin Ray Song*,
Jinzhou Li*,
Rao Fu*,
Devin Murphy,
Kaichen Zhou,
Rishi Shiv,
Yaqi Li,
Haoyu Xiong,
Crystal Elaine Owens,
Yilun Du,
Yiyue Luo,
Xianyi Cheng,
Antonio Torralba,
Wojciech Matusik,
Paul Pu Liang
Technical Report
Webpage •
Paper •
Open Source Hardware
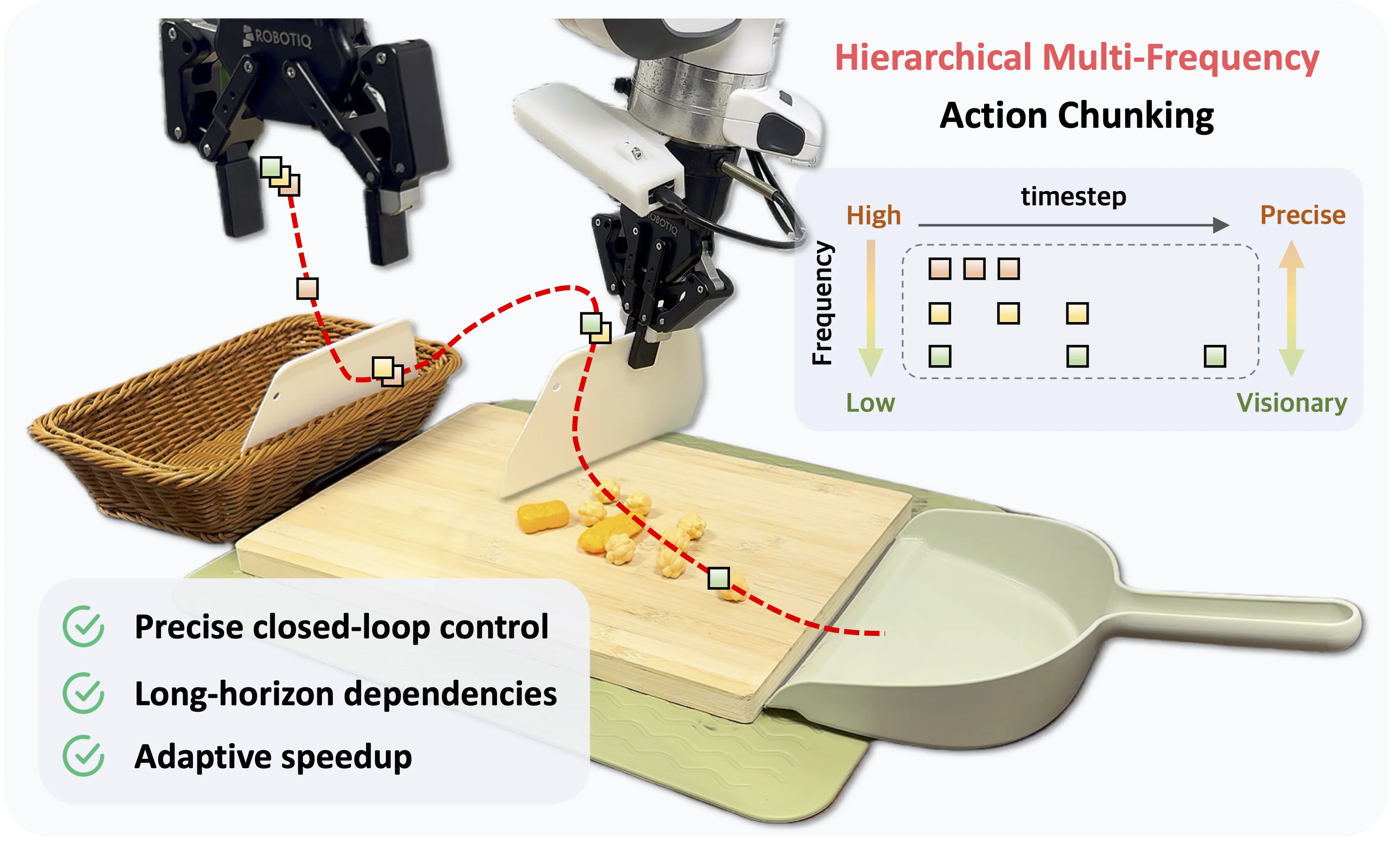
Hierarchical Policy: Multi-Frequency Action Chunking across Hierarchical Temporal Resolutions for Robotic Imitation Learning
Jiyao Zhang,
Zimu Han,
Junhan Wang,
Xionghao Wu,
Shihong Lin,
Jinzhou Li,
Hongwei Fan,
Ruihai Wu,
Dongjiang Li,
Hao Dong
Under Review
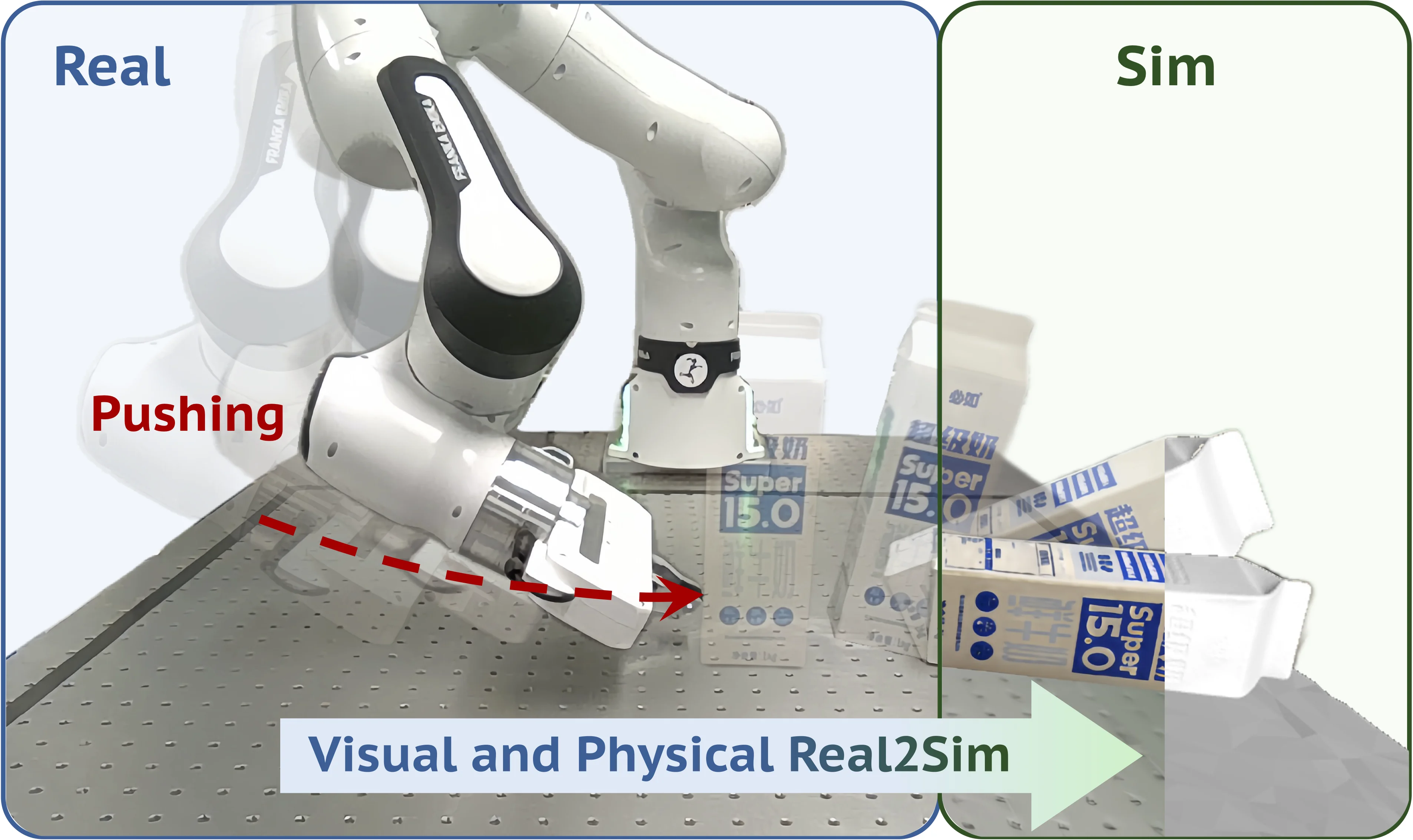
TwinAligner: Visual-Dynamic Alignment Empowers Physics-aware Real2Sim2Real for Robotic Manipulation
Hongwei Fan*,
Hang Dai*,
Jiyao Zhang*,
Jinzhou Li,
Qiyang Yan,
Yujie Zhao,
Mingju Gao,
Jinghang Wu,
Hao Tang,
Hao Dong
Technical Report
Webpage •
Paper
•
Code
ClutterDexGrasp: A Sim-to-Real System for General Dexterous Target Grasping in Cluttered Scenes
Zeyuan Chen*, Qiyang Yan*, Yuanpei Chen*, Tianhao Wu, Jiyao Zhang, Zihan Ding, Jinzhou Li, Yaodong Yang, Hao Dong
Conference on Robot Learning (CoRL) 2025
Oral Presentation (~5% of total accepted papers)
Webpage •
Paper •
Video
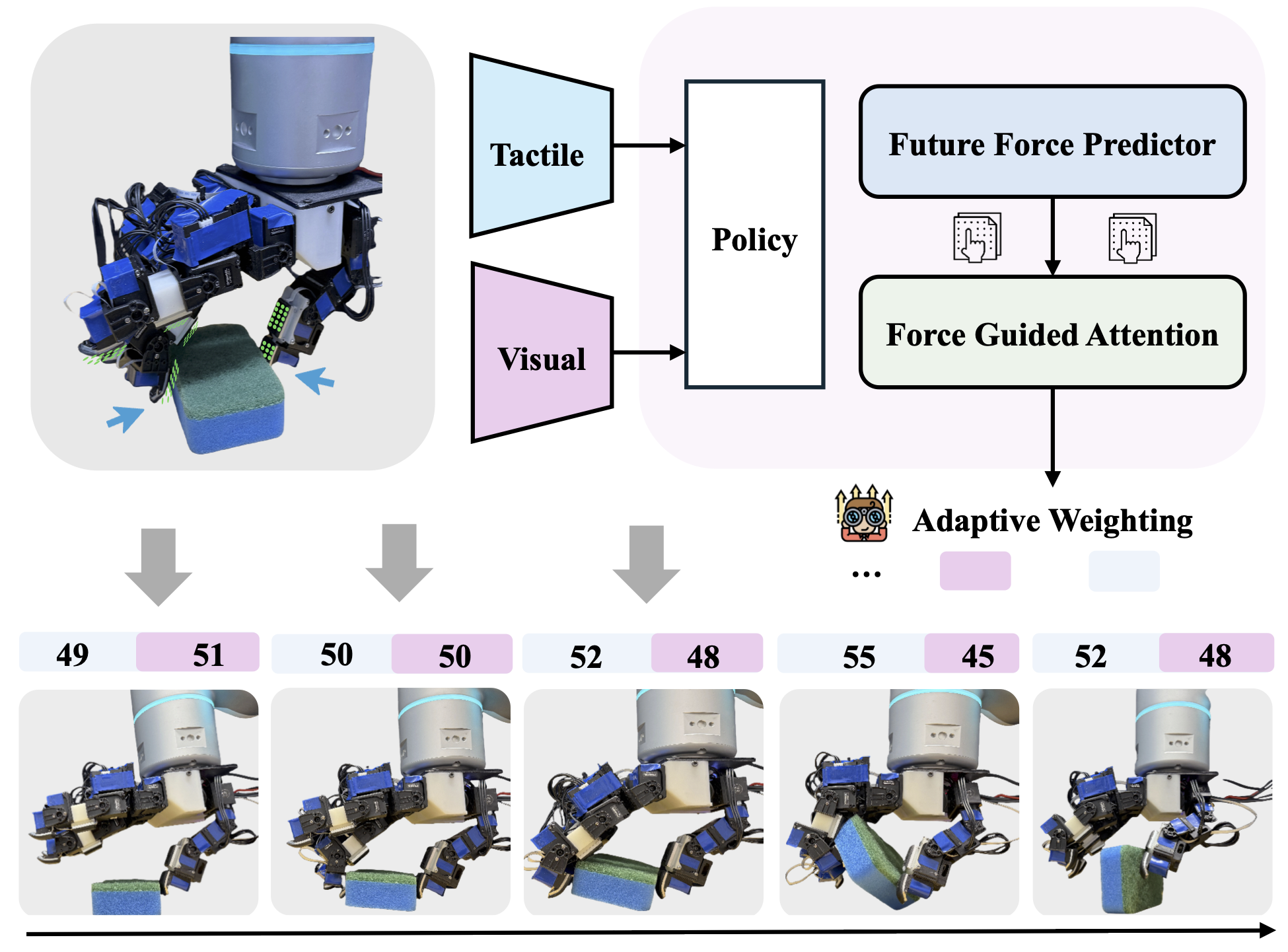
AdapTac-Dex: Adaptive Visuo-Tactile Fusion with Predictive Force Attention for Dexterous Manipulation
Jinzhou Li*,
Tianhao Wu*,
Jiyao Zhang**,
Zeyuan Chen**,
Haotian Jin,
Mingdong Wu,
Yujun Shen,
Yaodong Yang,
Hao Dong
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
Webpage •
Paper
•
Code •
Hardware •
Video
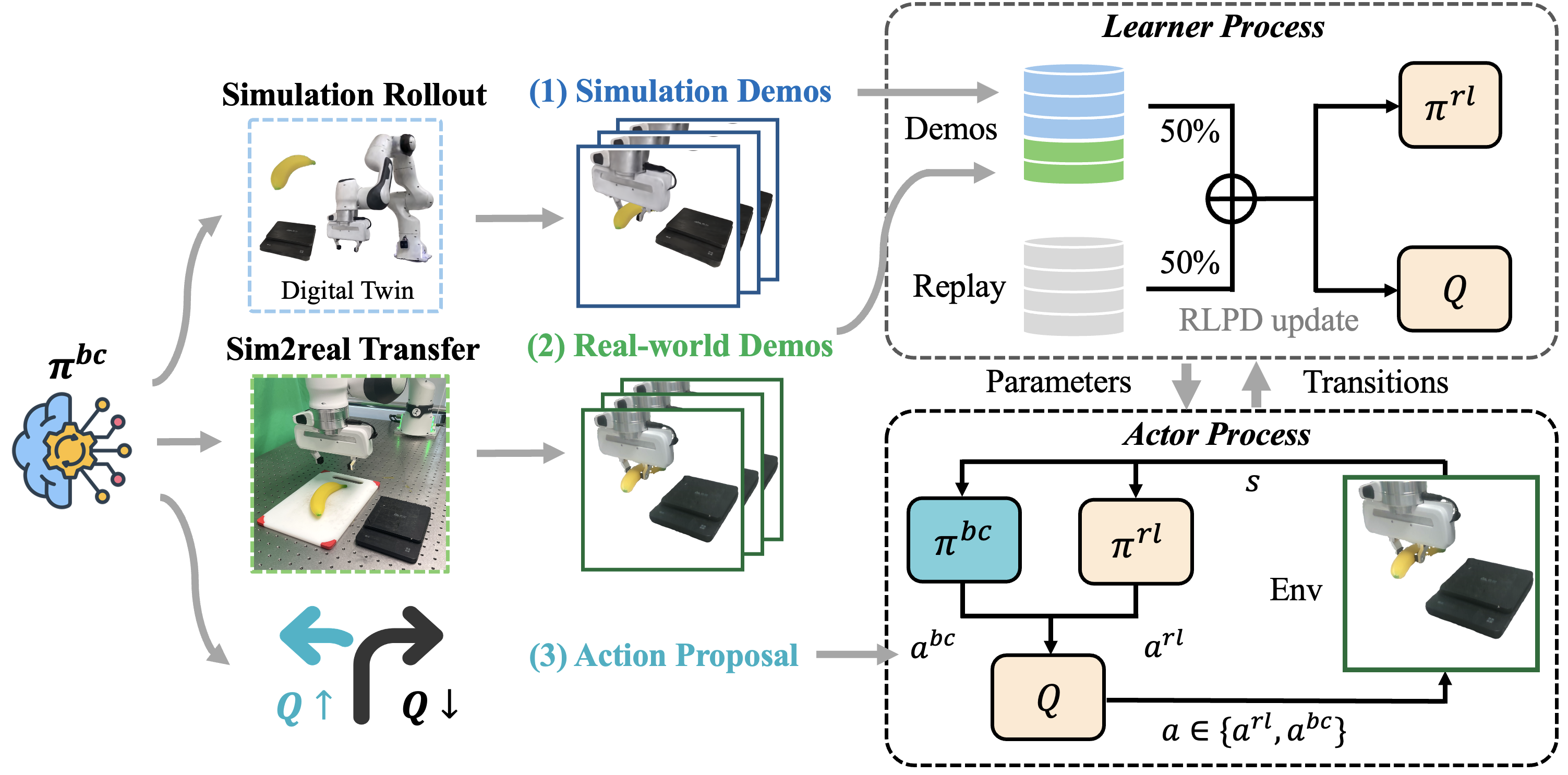
SimLauncher: Launching Sample-Efficient Real-world Robotic Reinforcement Learning via Simulation Pre-training
Mingdong Wu*,
Lehong Wu*,
Yizhuo Wu*,
Weiyao Huang,
Hongwei Fan,
Zheyuan Hu,
Haoran Geng,
Jinzhou Li,
Jiahe Ying,
Long Yang,
Yuanpei Chen,
Hao Dong
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
Webpage •
Paper •
Video
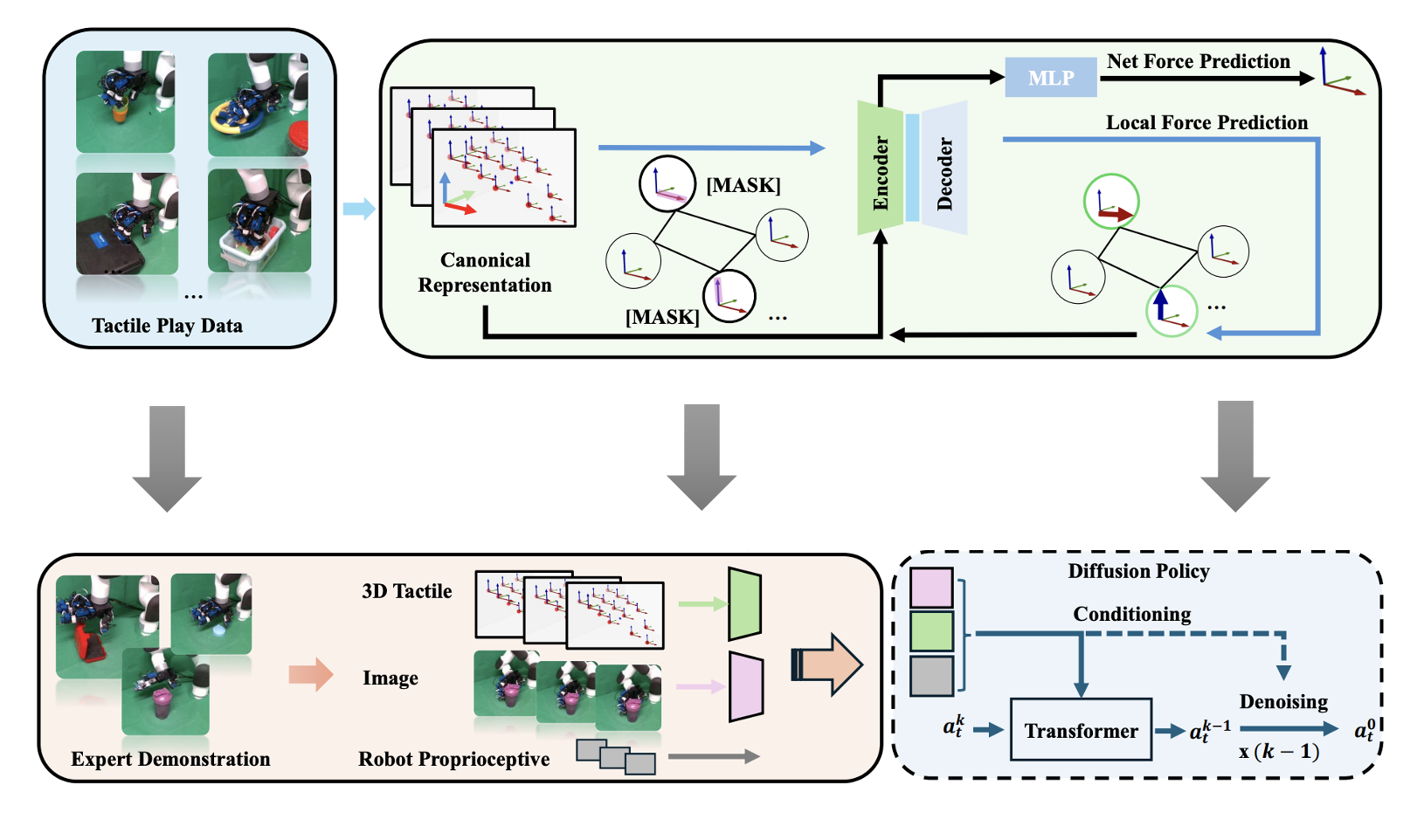
Canonical Representation and Force-Based Pretraining of 3D Tactile for Dexterous Visuo-Tactile Policy Learning
Tianhao Wu,
Jinzhou Li*,
Jiyao Zhang*,
Mingdong Wu,
Hao Dong
IEEE International Conference on Robotics and Automation (ICRA) 2025
Webpage •
Paper •
Code •
Video
2026
If you are a highly motivated undergraduate or master's student interested in research opportunities, feel free to reach out via email. Please also cc my advisor.2025
We released OpenTouch, a benchmark for full-hand touch in the wild2024
Joined Peking University as a visiting student, advised by Prof. Hao Dong